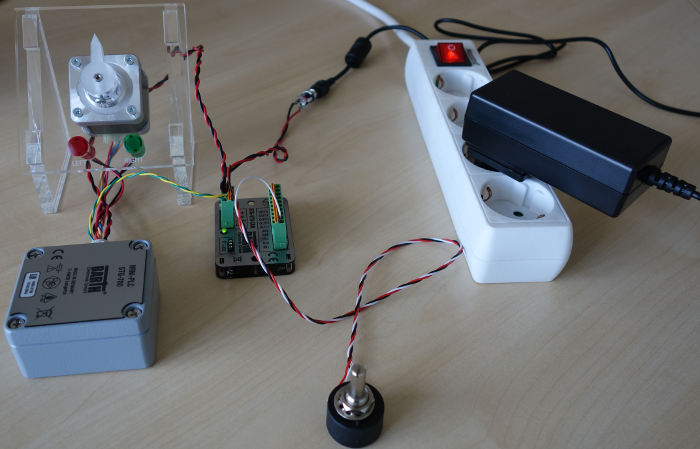
Versuchsaufbau mit STG-570, STG-700 und Schrittmotor
Teil 1 - Einleitung und technische Eigenschaften
Teil 2 - Versuchsaufbau - Aufbau der Einzelteile
Teil 3 - Erste Schritte in miCon-L
Teil 4 - Wie die SPS bezüglich des Versuchsaufbaus programmiert werden
In dieser Videoserie wird Schritt für Schritt erklärt, wie Sie den Versuchsaufbau im Bild programmieren können.
Teil 1 - Einleitung und technische Eigenschaften
Stichworte: STG-570 CAN, STG-700 STEP, Schrittmotor, LED, Potentiometer
Die technischen Eigenschaften der BARTH Mini-SPS lococube® STG-570 CAN und STG-700 STEP werden in Teil 1 beschrieben. Des weiteren werden alle weiteren notwendigen Zubehörteile für diesen Versuchsaufbau aufgezählt.
Die Einzelteile für diesen Versuchsaufbau können Sie im RS Components Webshop bestellen.
Sollten Sie das Video nicht abspielen können, klicken Sie hier.
Die Mini-SPS STG-570 CAN hat folgende Eigenschaften:
- Universelle Kleinsteuerung mit CAN-Bus
- 3 Analogeingänge 0..30 VDC, 12 Bit ADC
- 2 Digitaleingänge bis 1 kHz
- 4 verschleißfreie Power-Ausgänge je 1,5 A
- 1 Power-PWM-Ausgang 2 A/1..10 kHz
- 1 CAN 2.0A/B Interface
- Verschleißfreie Solid-State Ausgänge
- Fail Safe Oszillator
- Programmierbare Status-LED
- TTL-232/USB-Anschluss für PC
- Grafisch und intuitiv programmierbar
- Großer Betriebsspannungsbereich 7..32 VDC
- Großer Temperaturbereich von -40..+70°C
- Robust und vibrationsfest durch PU-Verguss
- Extrem flaches Gehäuse
- Entwickelt und produziert in Deutschland
Die Mini-SPS STG-700 STEP hat folgende Eigenschaften:
- 2 Analogeingänge 0..30 VDC, 12 Bit ADC
- 2 Digitaleingänge bis 1 kHz
- 4 verschleißfreie Power-Ausgänge je 1,5 A
- Schrittmotor-Ausgang 1,5A bipolar
- 1 CAN 2.0A/B Interface
- Verschleißfreie Solid-State Ausgänge
- Fail Safe Oszillator
- Programmierbare Status-LED
- TTL-232/USB-Anschluss für PC
- Grafisch und intuitiv programmierbar
- Großer Betriebsspannungsbereich 8..32 VDC
- Großer Temperaturbereich von -40..+50°C
- Robust und vibrationsfest durch PU-Verguss
- Aluminiumgehäuse IP66
- Entwickelt und produziert in Deutschland
Einzelteile für den Versuchsaufbau im RS Webshop erhältlich
Hybrit Schrittmotor von Sanyo Denki
- Schrittwinkel 1,8°
- Nennspannung 24 VDC
- Baugröße 42x42 mm
- Nennstrom 1 A
- Bipolarer Wicklungsaufbau
Anzeigelampe LED von APEM
Potenziometer von RS Pro:
- Widerstand 10 kΩ
- Leistung 1 W
- Windungszahl 1
Optionale Einzelteile im RS Webshop
2,5 mm DC Buchse von RS Pro
- Betriebsspannung 12 VDC
- Nennstrom 5 A
Verdrahtungsleitung von RS Pro
- Leiterquerschnitt 0,22 mm2
- Nennstrom 1,4 A
Steckernetzteile von RS Pro
- Eingangsspannung 230 V
- Ausgangsspannung 24 V
- Ausgangsstrom 1,5 A
- Wird mit vier austauschbaren Steckern geliefert
Teil 2 - Versuchsaufbau - Aufbau der Einzelteile
Teil 2 der Video-Serie erklärt die Applikation und wie die einzelnen Teile miteinander arbeiten. Es wird beschrieben, welches Bauteil was macht. Es ist notwendig, um die SPS später programmieren zu können.
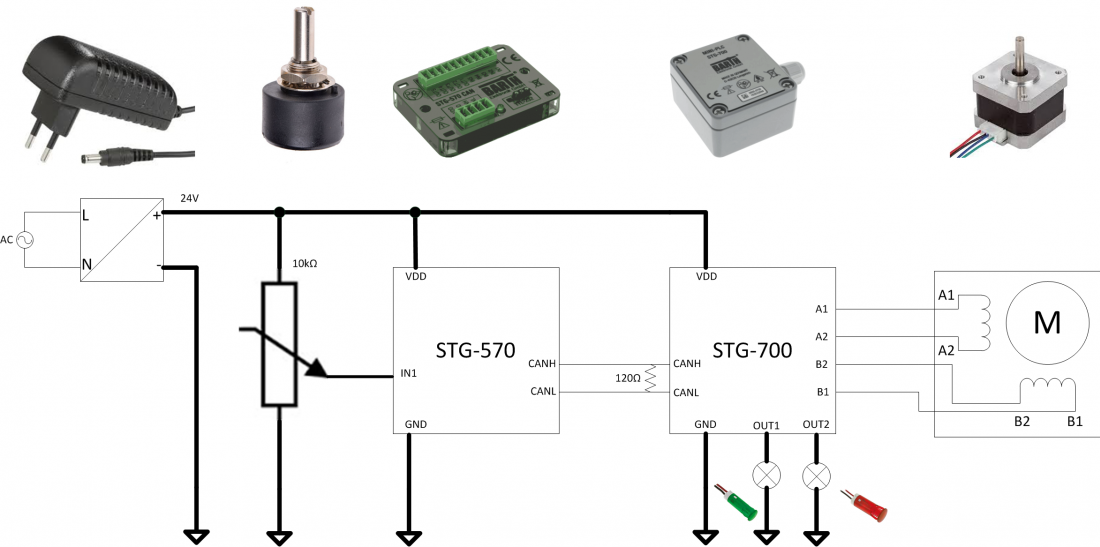
Die grundlegende Idee des Versuchsaufbaus ist die folgende: Wenn das Potentiometer gedreht wird, wandeln die SPS das Spannungssignal in ein digitales Eingangssignal um und leiten diese Information an den Schrittmotor weiter. Der Schrittmotor wird in der Lage sein je nach Geschwindigkeit, Richtung und Winkel eine 360° Umdrehung zu machen. Außerdem zeigt die rote bzw. grüne LED die Richtung des Schrittmotors an.
Sollten Sie das Video nicht abspielen können, klicken Sie hier.
Teil 3 - Erste Schritte in miCon-L
Stichworte: miCon-L herunterladen, miCon-L downloaden, Blockdiagramm, Verbindung, Verbindungslinie, Download, Echtzeit, Realtime, Onlinemodus, Online, Benutzeroberfläche, Projektbaum, Konfiguration, Programmbaustein, Makrobaustein, Funktionsbaustein, Bibliothek, Arbeitsblatt, Menü, Werkzeugleiste, Kontextmenü, Bearbeiten, Bearbeitungsmodus
Sollten Sie das Video nicht abspielen können, klicken Sie hier.
Dieser Teil stellt miCon-L vor, es wird gezeigt wo die Software heruntergeladen werden kann und wie die Software installiert wird. Sie werden einen Einblick in die Benutzeroberfläche die Programmiersoftware bekommen und es wird gezeigt, wie Sie Ihre Applikation in Echtzeit beobachten können. Das Forum und das miCon-L Portal werden im Video auch vorgestellt. Das miCon-L Portal ist die Hauptversorgungsquelle, wenn es darum geht, Dokumentation und Hilfe rund um miCon-L zu finden.
Teil 4 - Wie die SPS bezüglich des Versuchsaufbaus programmiert werden
Stichworte: PC mit SPS verbinden, COM Port, Template, CAN Controller Init/Info, CAN Nachricht senden, CAN Nachricht empfangen, CAN Controller Status, Baudrate, Visualisierungsbausteine, CAN ID, Schrittmotor, Schrittgeschwindigkeit, Konverter, Zykluszeit, Inbetriebnahme, Taskeigenschaften
Die Programmierung der Controller ist in zwei Teile geteilt. Im ersten Teil (Teil 4) erfahren Sie, wie Sie die Aufgabe grundsätzlich gelöst bekommen.
Dieser Teil ist besonders für Anfänger geeignet. Schritt für Schritt wird erklärt, welcher Baustein warum eingefügt wird. Die Lösung des Problems ist einfach, allerdings weist sie einige Schwächen auf. Deswegen wird in Teil 5 eine umfangreichere Lösung gegeben.
Hier finden Sie die Demo-Applikationen als Zip-Datei zum Download:
Sollten Sie das Video nicht abspielen können, klicken Sie hier.
Teil 5 - Wie bekomme ich einen ruhigeren Motor?
Stichworte: Mikroschritt, Schalter, Begrenzer, Mittelwert, Hysterese, Vergleich, Onlinemodus, Download, Taskeigenschaften, Konfiguration, Zykluszeit, CAN Controller Init/Info, CAN Nachricht senden, CAN Nachricht empfangen, CAN Controller Status, CAN ID
Sollten Sie das Video nicht abspielen können, klicken Sie hier.
Dieses Video baut auf das vorherige Video, Teil 4 dieser Serie, auf. Die grundlegende Applikation ist entwickelt, und wir haben einige Zwischenschritte eingefügt, damit der Schrittmotor ruhiger und gleichmäßiger läuft. Die zusätzlichen Programmzweige werden ausführlich erklärt.
Hier finden Sie die Demo-Applikationen als Zip-Datei zum Download:
Wir hoffen, Ihnen hat diese Demo gefallen und sie hilft Ihnen, die Leistung der BARTH Mini-SPS lococube® und der kostenfreien miCon-L Software von ProSign einzuschätzen. Sollten Ihnen dennoch Probleme beim Nachbau oder bei der Erweiterung der Demo des oben gezeigten Versuchsaufbaus begegnen, schauen Sie im miCon-L Portal und im miCon-L Forum vorbei. So sollten alle Ihre Fragen beantwortet werden.
Wenn Sie diese Art von Tutorials hilfreich finden, hinterlassen Sie uns doch einen Kommentar mit Wünschen für weitere Projekte dieser Art. Das oben dargestellte Projekt ist nur ein grundlegender Start, mit den BARTH Mini-SPS und ProSigns miCon-L können Sie noch so viel mehr machen… Fordern Sie uns heraus!